



組込みシステム(※1)の開発工程を活用して、システムを作る技術力およびプロジェクトの推進力を身につけることを目標とした授業です。
授業内容
 この授業は、専門教育科目の授業で、工学部情報工学科の3回生を対象に、後学期に全15回の講義が開講されています。
この授業は、専門教育科目の授業で、工学部情報工学科の3回生を対象に、後学期に全15回の講義が開講されています。
この授業の見せ場のひとつ、「Zumoロボット実演」を行う第8回目の講義のレポートです。
授業は早速、学生同士がチームを組んで制作したシステムを搭載したZumoロボットの実演から始まりました。(ロボットコンテストさながらです。)2人一組で10チームが、次々とみんなの前でロボットの実演を行い、工夫した点と苦労した点を口頭発表します。
今回のシステム制作の課題は、光センサー、加速度センサー、ジャイロセンサーを使用して、次の一連の動作を実現することです。①板の上に乗せると自動的に北を向くよう初期化 ②初期化3秒後、螺旋を描いて旋回 ③板の傾きを検知すると、ロボットの頭が傾きの頂点を向く姿勢を保つ ④板が水平に戻ると巡回を再開 ⑤板の境界を検知するとバックしてから巡回
どのチームもひとつとして同じような動きをするところはなく、発表者の表情や口調からも、システム制作にのめり込んだ様子や試行錯誤の様子がうかがえました。他のチームの発表を食い入るように見る学生の眼差しからは、さらに良いものを作りたい、技術を吸収したい、という想いが伝わってきました。
(文系出身の記者にとっては、ロボットが動くということ自体が感動的でした!)
実演と発表が終わると、教員からの講評があり、これまでに学んだ開発プロセスに従っていたか、構造化分析手法を利用していたか、チームメンバーの役割分担を明確化していたか、機能検証項目を明確化したか、などを改めて問いかけ、次の課題取組にあたって大切な考え方の確認を含めた講義がありました。
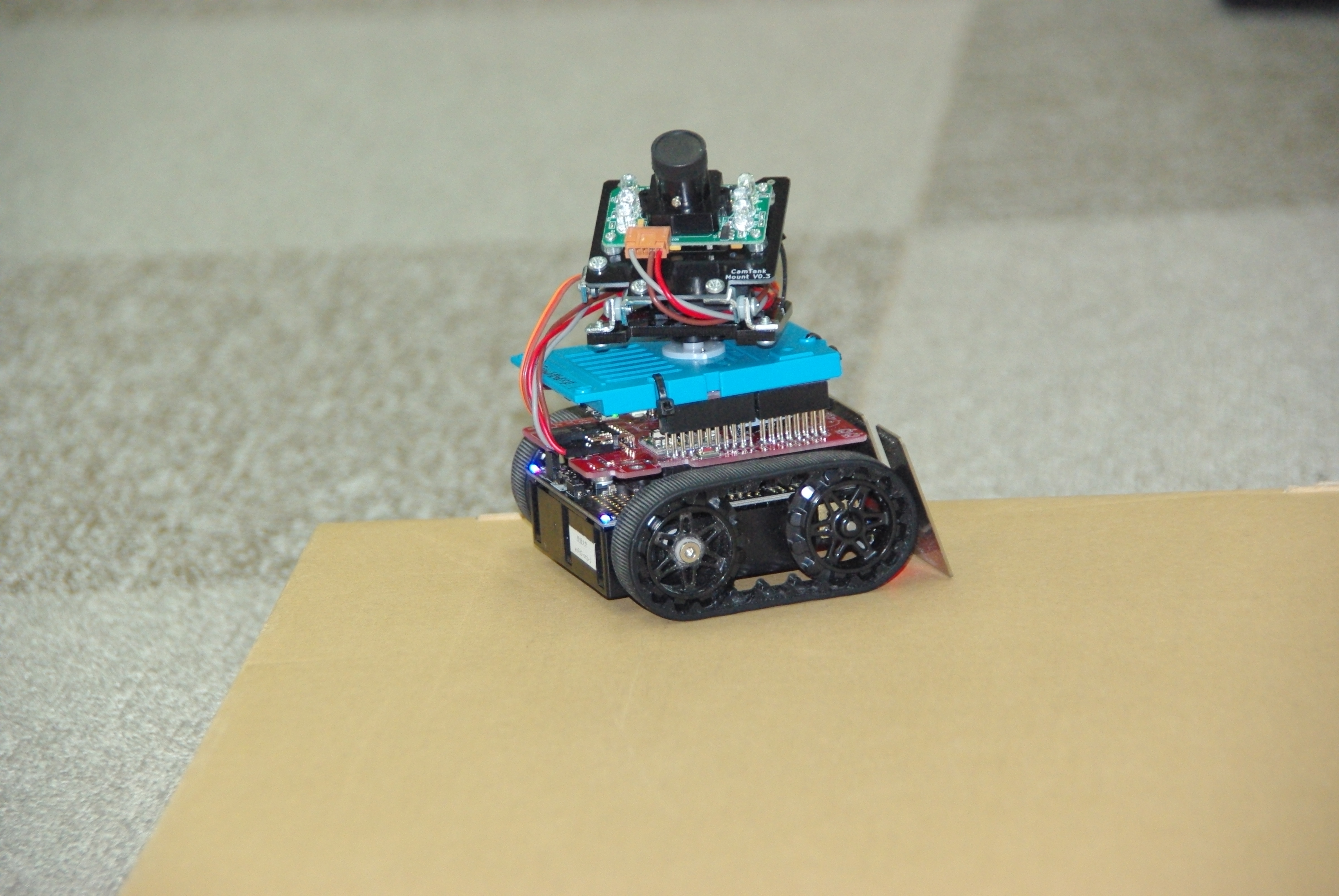
続いて、次のPBL演習課題(※2)の説明がありました。次の課題は、これまでに学び、身につけてきた組込みシステムの開発工程を活用して、新たなシステムを搭載した各チーム独自のZumoロボットを制作するものです。教員からは、開発環境の例として、加速度センサーや磁気センサーを使用した場合、カメラモジュールを使用した場合などの説明がありました。例えば、バーコード識別による自己走行ロボット、衝突から自己学習する障害物回避ロボット、カメラによるカラーボール追跡ロボット、カメラによるQRコード検知制御ロボットなど。
学生は、教員の説明を聞きながらも、既に頭の中ではどのようなロボットを作ろうか思案し始めており、そのために必要な知識や技術を、各自デスクにあるPCで、自由に調べていました。教員の説明をただ聴くだけでなく、疑問に思ったことは、その場で各自調べても良いルールとなっていて、学生の自主性を重視した効率的でアクティブな授業でした。
講義終了後に、教室の外で出会った受講生に「あんなロボットが作れるなんですごいね!」と声をかけると、「工学部の学生なら誰でも作れますよ!」と自信に溢れたステキな笑顔で返してくれました。その笑顔からは、課題をクリアするために悩みながらも、成果が生まれたときの達成感の素晴らしさを感じられるものでした。



(※1)組込みシステムとは、携帯電話やスマートフォンをはじめ、テレビや洗濯機といった家電・自動車・製造ロボットなどに組み込まれているコンピュータシステムのことです。
(※2)PBL(=Project/Problem Based Learning)とは、課題解決型実習のことで、知識の暗記などの受動的な学習ではなく、自ら問題を発見(設定)し、解決する能力を養うことを目的とした教育法のことです。
追加取材
システムデザイン授業の「PBL演習成果発表会」を後日、取材しました。当日は、外部評価委員として東京と大阪の企業から3人にご参加いただき、各発表に対する質疑やコメントをいただきました。
これまでの授業で学んだ知識と技術を応用して、各チームが独自に考えて製作したロボットについてプレゼンを行いました。カメラモジュールを使ったボール追跡ロボット、ライントレースでの自動運転と信号機検知制御ロボットなどに加え、笑顔接近システム搭載ロボットもありました。各チームそれぞれ、システム内容、データフローダイアグラム、役割分担、作業工程、開発に必要な知識やスキルなどについて、限られた時間内で、効率よく分かりやすく発表を行います。いずれの発表に対しても、外部評価委員から、適切なご指摘やアドバイスがあり、受講生にとっては、更なる知識向上と技能修得に繋がるものとなっていました。
システムデザインの授業は、在学中に、企業の方を前にプレゼンをして、適切なアドバイスをいただける貴重な機会があり、自らが、課題を発見・解決する能力やコミュニケーション能力を養うことができるという点においても、有益な授業でした。




教員からのコメント
 現在、あらゆるモノが繋がる超スマート社会の実現に向けて全世界では、様々な産業分野でIoTや人工知能(AI)技術の普及が急速に進んでおり、IoTやAIシステムの設計・開発・導入・運用ができる組込みシステム技術者を育成することが極めて重要となります。この授業は、文部科学省の教育事業enPiTの組込みシステム分野人材育成のための課題解決型(PBL)科目であり、授業では、ZUMOロボットを用いてチームでシステムの計画から設計、実装、検証までの開発演習を実施することで、学生が将来の組込みシステム技術者として必要不可欠な4種のPro能力(システムを作る技術力、開発工程を進める能力、プロジェクト管理能力とソフトスキル)を育成することを目指しております。
現在、あらゆるモノが繋がる超スマート社会の実現に向けて全世界では、様々な産業分野でIoTや人工知能(AI)技術の普及が急速に進んでおり、IoTやAIシステムの設計・開発・導入・運用ができる組込みシステム技術者を育成することが極めて重要となります。この授業は、文部科学省の教育事業enPiTの組込みシステム分野人材育成のための課題解決型(PBL)科目であり、授業では、ZUMOロボットを用いてチームでシステムの計画から設計、実装、検証までの開発演習を実施することで、学生が将来の組込みシステム技術者として必要不可欠な4種のPro能力(システムを作る技術力、開発工程を進める能力、プロジェクト管理能力とソフトスキル)を育成することを目指しております。
学生からのコメント
 システムデザインの授業では、技術者として必要なエンジニアリング・デザイン能力を身に着けることを目的として各テーマに分かれて開発を体験します。
システムデザインの授業では、技術者として必要なエンジニアリング・デザイン能力を身に着けることを目的として各テーマに分かれて開発を体験します。
私たちはそのテーマの中でも組込みシステム開発を行っています。組込みシステムと聞くと想像がつきにくいかもしれません。しかし、スマートフォンからテレビやエアコン等の家電製品、自動車や飛行機等の輸送機器に至るまで組込みシステムが使われています。
2年生までは、プログラミングした結果はコンピュータのディスプレイ上だけに表れていましたが、組込みシステム開発では、ロボットの動きに結果が表れるところが面白いところだと思います。ロボットはプログラミングしたときに意図した動きをしてくれないとき、パソコンの画面とにらめっこではなく、一緒に開発をするメンバーと話し合いながら開発を進めていくことでコミュニケーション能力を磨くことができるのもこの講義の魅力の一つだと思います。
この「システムデザイン」は、学生同士でチームを組み、そのチームごとで作りたいと思うシステムを作る ことができる講義です。この講義の最初の授業では、先生方からいくつか選択肢が出され、学生はその選択肢から自分のやりたい内容を選ぶことができます。私は以前から、センサーなどを利用したシステム開発システムに興味があったので組み込み機器を使用したシステム開発を選びました。
システム開発などの基礎的なことは、担当の先生方から教えていただくことができるのですが、実際にシステム を作っていく際は、自分のチームと協力しながら作っていかなければなりません。最初は、この開発環境でどのようなことができるのか、どうしたら思った通りに機器が動いてくれるのかなどを試行錯誤 しながら行うのでとても悩んでしまいます。ですが、機器が思った通りに動いてくれたり、システムが完成したりした際には、達成感を強く感じることができると思います。